6.1. Multi camera sync
Contents:
6.1.1. Preparation
First, please read the Multi-machine Synchronizer User Documentation:https://www.orbbec.com/docs/set-up-cameras-for-external-synchronization_v1-2/
Secondly,make sure the camera is properly connected to the multi-camera synchronizer
Finally,please browse the launch file for multi-machine synchronous startup:https://github.com/orbbec/OrbbecSDK_ROS2/blob/main/orbbec_camera/launch/multi_camera_synced.launch.py
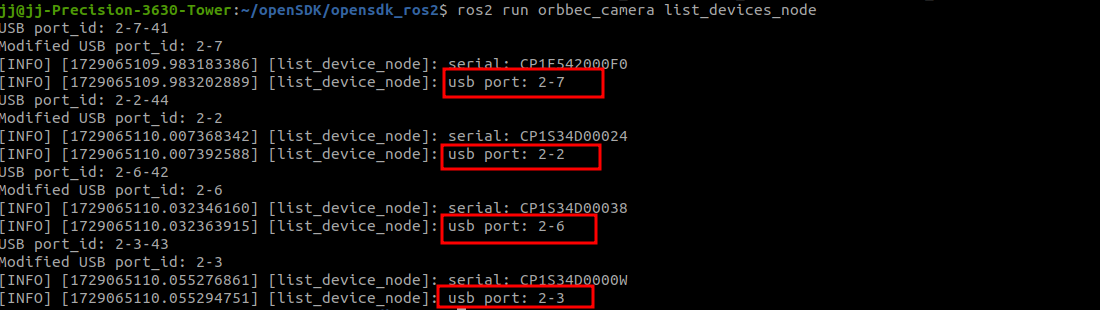
6.1.2. Check the camera usb port
ros2 run orbbec_camera list_devices_node
Output:
6.1.3. Configure multi_camera_synced.launch.py
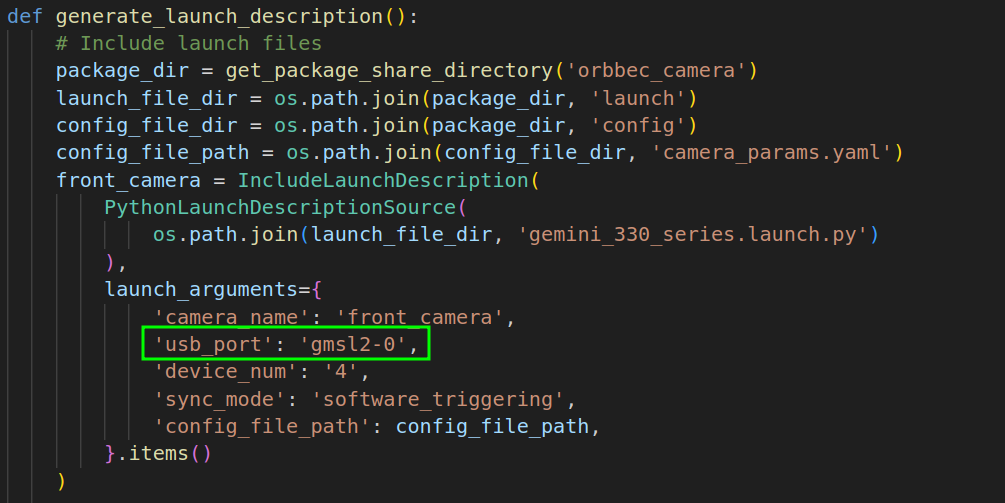
Open multi_camera_synced.launch.py, the camera configuration is as shown below
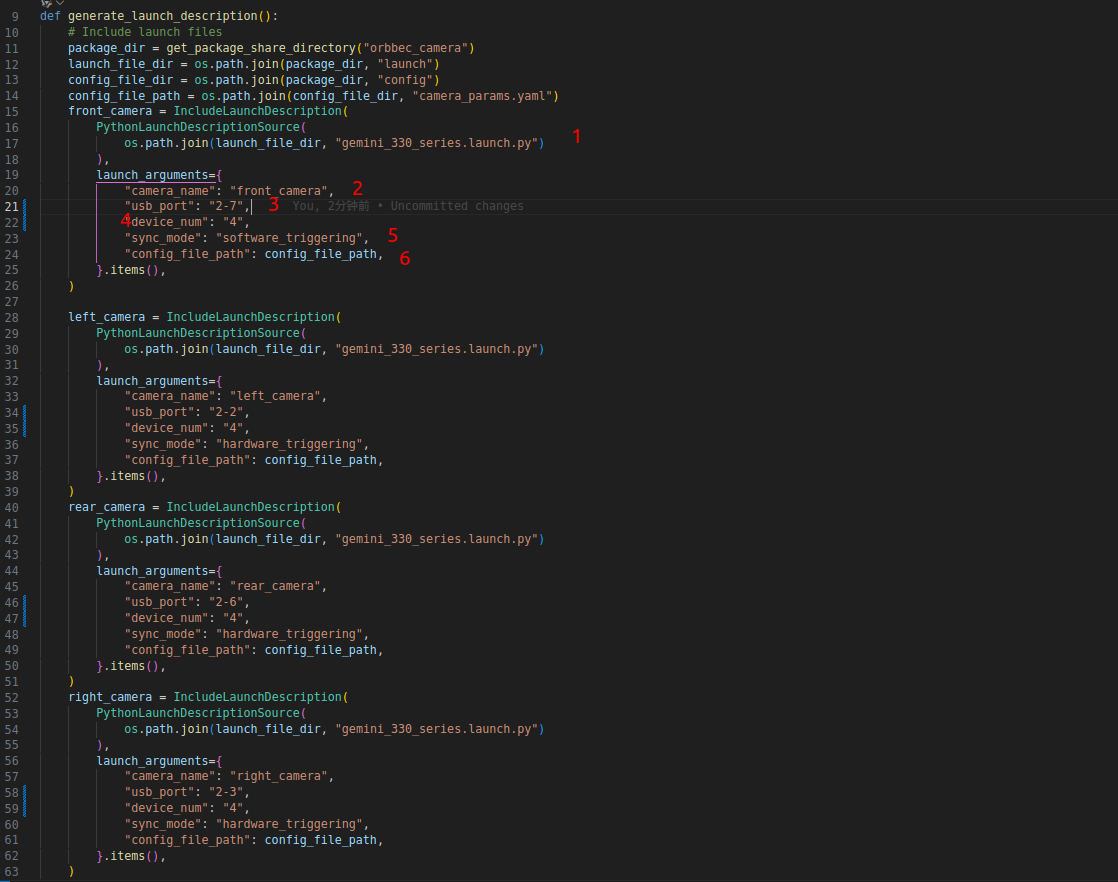
1.gemini_330_series.launch.py is the camera startup file
2.camera_name is set to front_camera, for example, the color image topic name is /front_camera/color/image_raw”
3.usb_port is set to 2-7, indicating that the 2-7 camera device is started, 2-7 is taken from the usb port output by ros2 run orbbec_camera list_devices_node
4.device_num is set to 4, indicating that four cameras are started
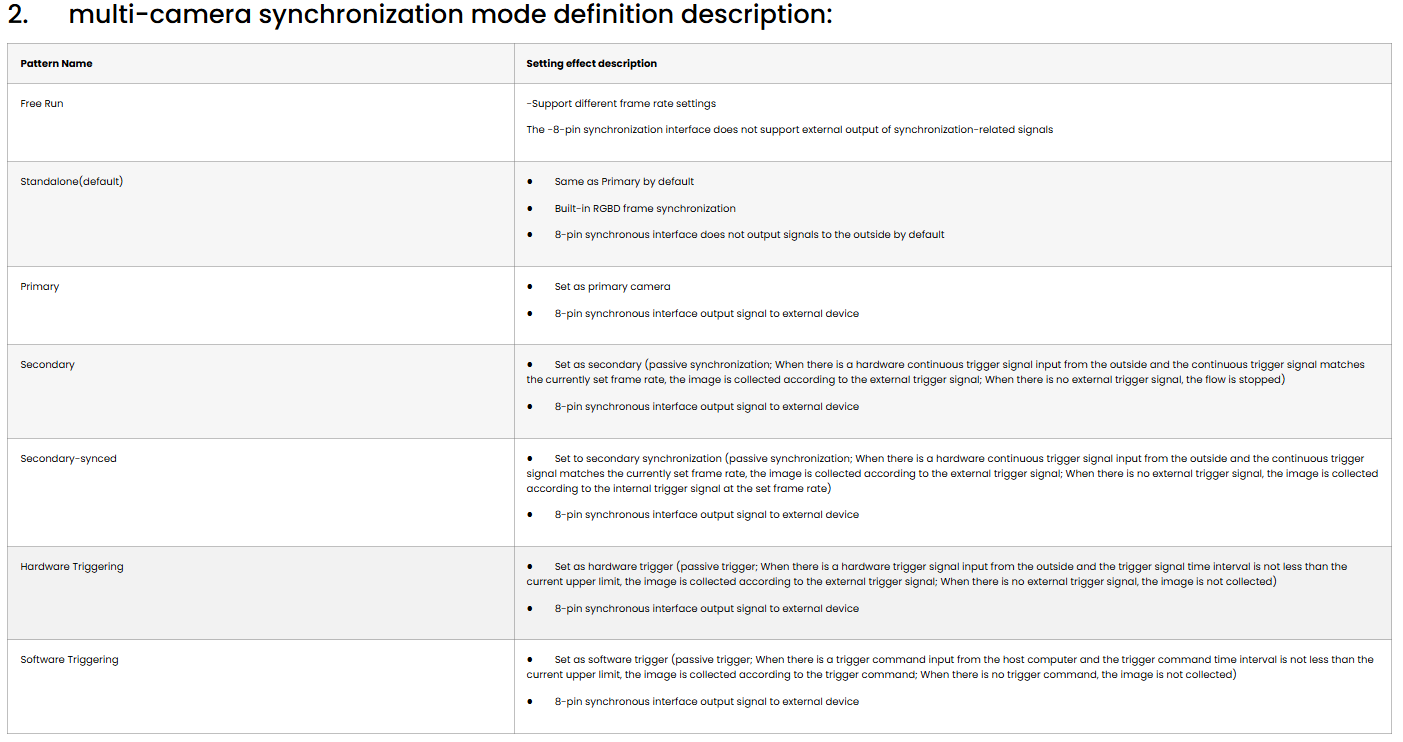
5.sync_mode is set to software_triggering, indicating that the 2-7 camera device is set to software trigger mode, and the selection of multi-machine synchronization mode can refer to the following figure
6.Calling the parameter settings in config_file_path will overwrite the parameter settings in emini_330_series.launch.py, optional
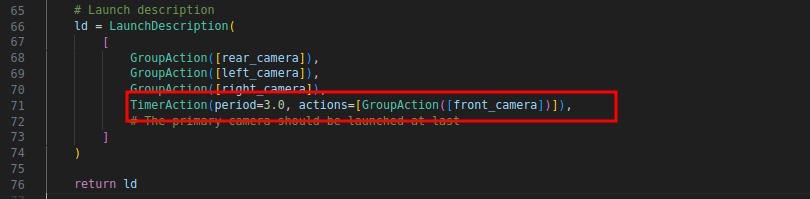
multi_camera_synced.launch.py camera startup order, the host must be started last
6.1.4. Run multi_camera_synced.launch.py
ros2 launch orbbec_camera multi_camera_synced.launch.py
6.1.5. Advanced Parameters
Some camera parameters are related to multi-camera sync
| Camera parameters | action |
|---|---|
| trigger_out_enabled | Trigger signal switch setting |
| trigger2image_delay_us | Configure the secondarydepth delay and secondarycolor delay |
| trigger_out_delay_us | Trigger signal delay |
| frames_per_trigger | Software trigger frequency(used with software_trigger_period) |
| software_trigger_period | Software trigger interval(used with frames_per_trigger) |
6.1.6. Gmsl example