1. Robot SDK概述
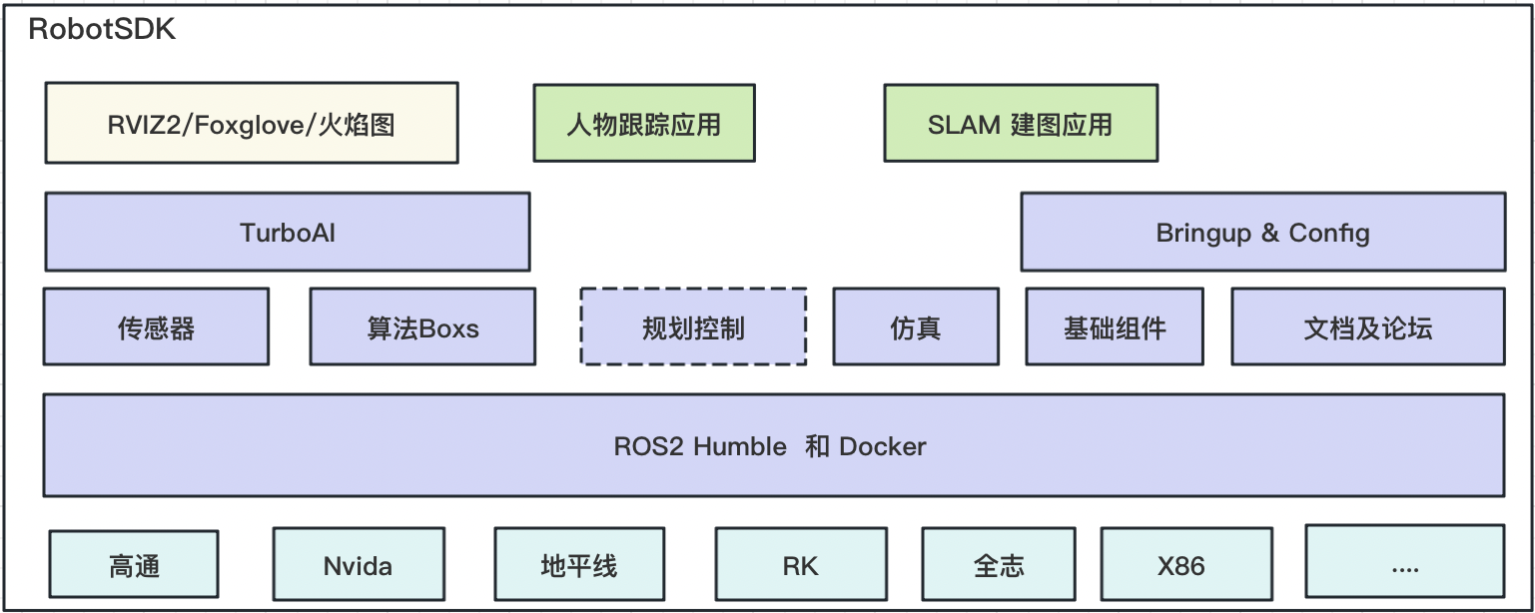
RobotSDK作为机器人的“大脑”模块,为机器人提供感知、决策、规划和TurboAI的模型部署和加速能力;SDK内部包含Apps应用示例,传感器模块,算法模块,TurboAI,Tools工具集合和基础组件的模块;各个模块设计采用独立设计,采用接口依赖原则,方便逐步扩展更多传感器,算法功能模块;
1.1. 功能介绍
核心功能
内置机器人常用各种应用Demo
内置机器人SLAM/避障/规划等算法
内置常用各种传感器驱动和多传感器融合方案
提供TurboAI的深度模型加速能力
提供机器人建图,定位和感知的应用案例
提供丰富文档,视频资料和论坛
提供foxglove/FlameGraph等调试工具
亮点:
“效率”:提供最少层级、高性能获取设备数据的能力
“灵活”:模块化传感器功能,灵活组合不同设备
“高可扩展”:支持日益多样化形态的设备及系统,以及插件化算法适用于不同场景
1.2. Robot SDK 软件目录
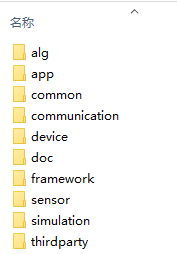
alg目录:存在机器人使用过程中常用一些算法,例如:VIO定位,SLAM,分割算法,障碍物检测算法,人物跟踪算法等;
app目录:放置使用Camera,Lidar传感器和一些算法组成一些具备独立运行的功能示例;
common目录: 放置一些基础的基础组件;
device: 放置机器人主板及本体的一些外设器件,例如mic,LED等
doc:放置SDK的一些使用,安装文档
framework:放置一些软件框架的配置,例如Nav2,Movelt2等;
sensor:放置机器人常用的传感器例如Camera,Lidar,RTK等;