1. 概述
RobotKit是面向开发者推出的机器人开发的软件工具包,包含机器人常用相机,Lidar等多传感器,提供建图,定位,感知,路径规划等机器人算法,还提供电机的PID/MPC等运动规控算法;为方便开发者入门,专门提供开源的机器人参考设计,帮助开发者一步一步的搭建一个完整机器人;
2. 功能介绍
RobotKit 为机器人开发提供一整套的工具集合,包含机器人参考设计案例,感知、决策和规划的RobotSDK,形态各异运控RobotActuator,提供丰富文档,论坛。
核心功能:
内置机器人SLAM/避障/规划等算法
内置常用各种传感器驱动和多传感器融合方案
多态机器人运动机构的支持
提供TurboAI的深度模型加速能力
提供机器人建图,定位和感知的应用案例
提供丰富文档,视频资料和论坛
亮点:
“效率”:提供最少层级、高性能获取设备数据的能力
“灵活”:模块化传感器功能,灵活组合不同设备
“高可扩展”:支持日益多样化形态的设备及系统,以及插件化算法适用于不同场景
3. RobotKit核心模块
| 内容 | 描述 |
|---|---|
| RobotCloud | 提供机器人云端的仿真,数据训练和机器人管理能力 |
| RobotRef | 各种机器人的参考设计方案,带领开发者一步一步搭建一个完整机器人形态 |
| RobotSDK | 作为机器人的“大脑”,提供感知、决策、规划和TurboAI的模型部署和加速能力 |
| RobotActuator | 作为机器人“小脑”,内置实时RTOS和PID控制算法 |
| Doc | 提供机器人开发者的所有的文档资料,帮助开发者快速入门| |
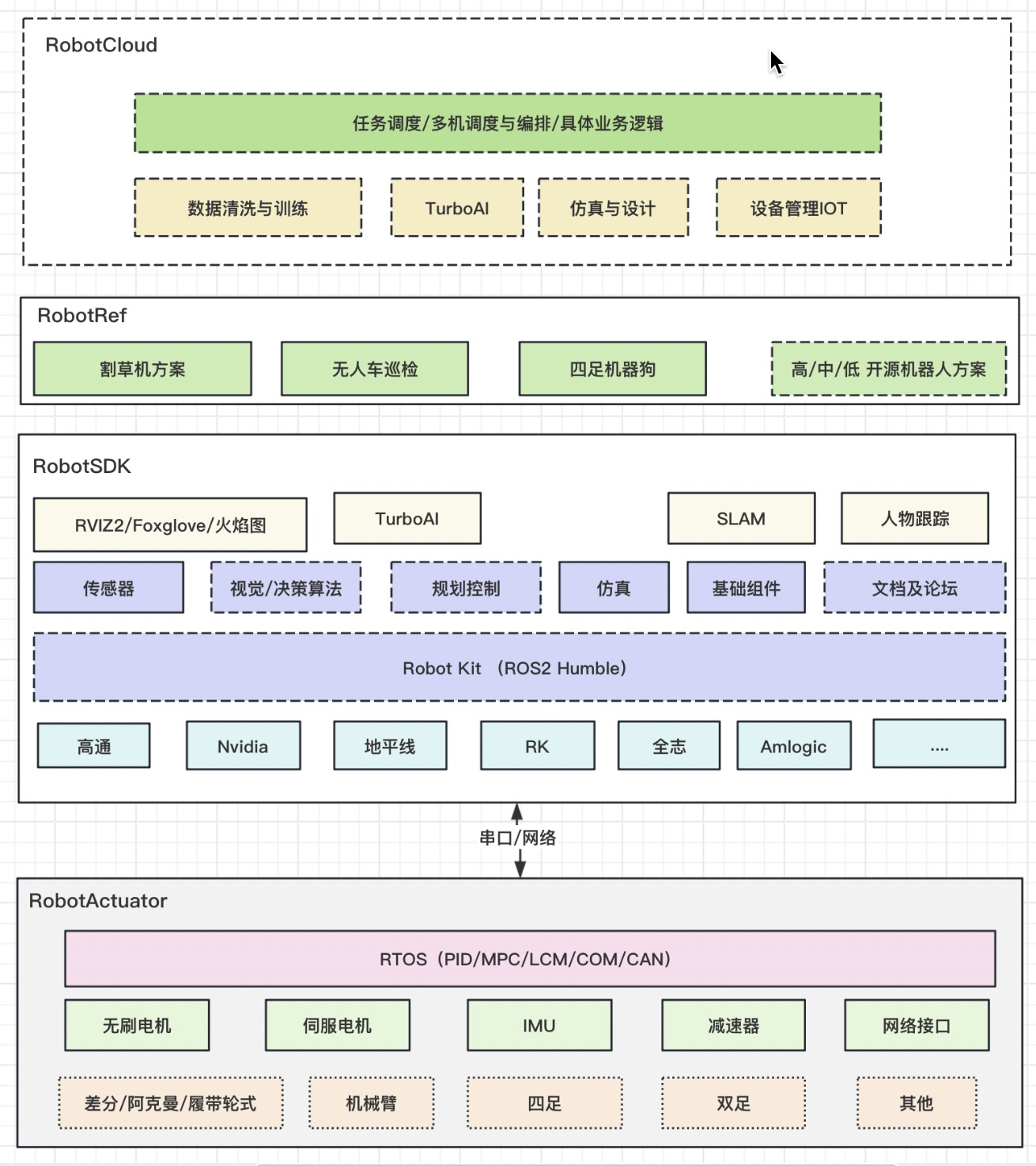
4. RobotKit框图
RobotKit 整体框架示意图