6.1. Foxglove可视化分析
6.1.1. 概述
Foxglove是一种用于ROS的可视化工具,起源于前Cruise员工基于Webviz创建的一个分支,旨在帮助开发人员更直观的理解和调试他们的ROS系统。它提供了一个更直观的用户界面,用于可视化ROS话题、消息和节点间的交互。用户可以查看实时数据流,调试ROS节点和消息传递,并监视ROS系统的状态。
Foxglove还提供了一系列实用工具,如消息记录和回放功能,以及对ROS图像和其他数据类型的支持。它的用户界面设计简洁直观,便于开发人员快速上手和高效的进行ROS系统的开发和调试工作。 相比较Webviz,它的功能更完善,关于它们之间的对比可参考:Foxglove和Webviz对比
6.1.2. 安装和设置Foxglove
Foxglove提供Web版和桌面app版(支持Linux、Windows、macOS)。
github地址:https://github.com/foxglove/studio
Web访问地址:https://studio.foxglove.dev/view?layoutId=30e02236-0d8d-40f0-a447-1975220cda91
app版本下载地址:https://foxglove.dev/download
Foxglove的桌面版功能更完善,部分功能只能在桌面版使用,如:
1.连接到数据
1.开启一个本地ROS1连接
2.连接到Velodyne雷达硬件
3.用package://为前缀的URL来加载本地URDF文件和mesh资源 2.关于扩展方面
1.通过marketplace安装扩展
2.本地安装扩展(参考第四部分) 3.其他
创建以foxgolve://为前缀的可共享链接
6.1.3. 连接到ROS堆栈
6.1.3.1. 连接数据源
打开foxglove,显示如下图: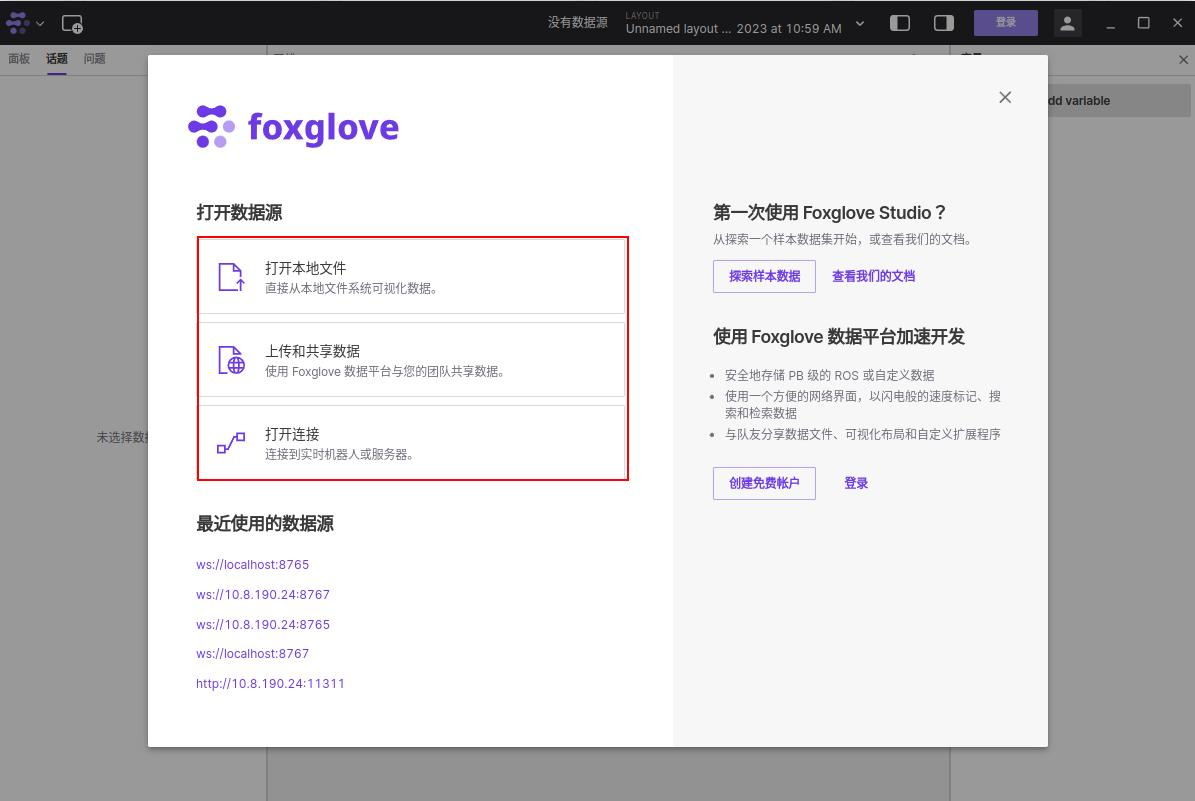
有三种数据源
| 数据源类型 | 功能 | 支持的格式 |
|---|---|---|
| 本地文件 | 检索本地的数据 | ROS1(.bag)MCAP(.mcap)PX4 ULog(.ugl) |
| 上传和共享数据 | 检索导入到Foxglove平台的数据 | ROS1MCAP |
| 打开连接 | 检索实时机器人堆栈或者远程的数据 | ROS1ROS2(1.可连接实时机器人;2.远程或本地的.db3数据需要通过mcap的 cli工具转成.mcap才能打开)Custom(1.通过Foxglove websocket实时传输自定义数据如:ProtoBuf、JSON、FlatBuffers;2.将本地或远程数据编码成.mcap播放)MCAPVelodyne |
MCAP是一种用于多模态日志的开源容器文件格式,它支持多个带时间戳的预序列化数据通道,适用于发布/订阅机器人应用程序。
打开连接有以下几种类型可选:
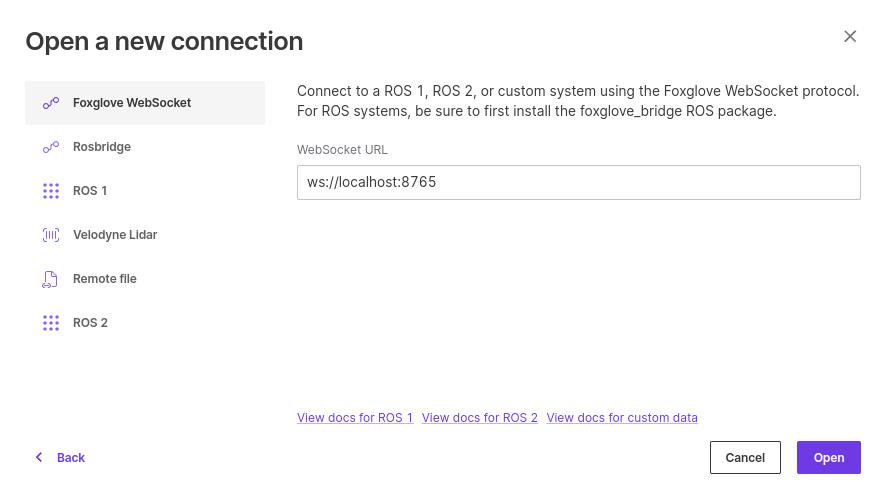
| 连接类型 | 主要功能 | 注 |
|---|---|---|
| Foxglove WebSocket | 在Foxglove和机器人之间只需要打开一个端口即可,运行一个额外的ROS节点foxglove_bridge | 默认8765端口 |
| Rosbridge | 在Foxglove和机器人之间只需要打开一个端口即可,运行一个额外的ROS节点rosbridge_server | 默认9090端口 |
| ROS1 | 连接 ROS1机器人 | |
| Velodyne Lidar | 连接雷达硬件设备 | |
| Remote file | 远程文件 | |
| ROS2 | 不支持,推荐直接使用Foxglove WebSocket. |
foxglove_bridge使用Foxglove WebSocket协议,这是一种类似于rosbridge的协议,但能够支持额外的模式格式,如:ROS2 .msg,ROS2.idl,参数,以及非ROS系统,这个桥接器是用C++编写的,旨在实现高性能和低开销,以最小化对机器人堆栈的影响。
安装:
支持ROS1 Melodic和Noetic,以及ROS2的Humble,Rolling,(Galactic以上都支持),早期版本可能由于API设计或者性能限制不支持。
sudo apt install ros-$ROS_DISTRO-foxglove-bridge
运行:
ros2 launch foxglove_bridge foxglove_bridge_launch.xml
rosbridge_server是用于ROS的工具,充当了ROS系统和其他系统之间的桥梁。它允许使用WebSocket协议的方式连接到ROS系统,从而可以通过网络传输ROS系统的消息和服务,使得非ROS系统和ROS系统之间可以实时通信,包括订阅和发布ROS主题,调用ROS服务,获取ROS参数等操作。
安装:
sudo apt install ros-<ROS_DISTRO>-rosbridge-server
运行:
ros2 launch rosbridge_server rosbridge_websocket.launch
6.1.3.2. 面板类型
面板是模块化可视化界面,可以配置成Foxglove布局,Foxglove提供了很多预定的面板供开发者快速使用,有以下类型。
6.1.3.2.1. 3D面板
在三维场景中显示标记、相机图像、网格、URDF和其他内容。
6.1.3.2.1.1. 支持的消息
3D面板可以可视化各种不同的消息,要可视化主题,消息类型必须符合以下消息之一。 1.相机视野
场景相机的标定参数
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/CameraInfo |
| ROS2 | sensor_msgs/msg/CameraInfo |
| Custom | foxglove.CameraCalibration |
2.网格
| 框架 | 样式 |
|---|---|
| ROS1 | nav_msgs/OccupancyGrid |
| ROS2 | nav_msgs/msg/OccupancyGrid |
| Custom | foxglove.Grid |
图像
使用相应的相机视野消息在3D场景中显示图像
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/Image |
| ROS1 | sensor_msgs/CompressedImage |
| ROS2 | sensor_msgs/msg/Image |
| ROS2 | sensor_msgs/msg/CompressedImage |
| Custom | foxglove.RawImage |
| Custom | foxglove.CompressedImage |
4.激光扫描仪
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/LaserScan |
| ROS2 | sensor_msgs/msg/LaserScan |
| Custom | foxglove.LaserScan |
5.ROS多边形
| 框架 | 样式 |
|---|---|
| ROS1 | geometry_msgs/PolygonStamped |
| ROS2 | geometry_msgs/msg/PolygonStamped |
6.ROS 标记
与场景实体类似,这些标记消息描述原始形状或者网格。
| 框架 | 样式 |
|---|---|
| ROS1 | visualization_msgs/Marker |
| ROS1 | visualization_msgs/MarkerArray |
| ROS2 | visualization_msgs/msg/Marker |
| ROS2 | visualization_msgs/msg/MarkerArray |
7.路径
| 框架 | 样式 |
|---|---|
| ROS1 | nav_msgs/Path |
| ROS2 | nav_msgs/msg/Path |
| Custom | foxglove.PosesInFrame |
8.点云
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/PointCloud2 |
| ROS2 | sensor_msgs/msg/PointCloud2 |
| Custom | foxglove.PointCloud |
9.姿势
| 框架 | 样式 |
|---|---|
| ROS1 | geometry_msgs/PoseArray |
| ROS1 | geometry_msgs/PoseStamped |
| ROS2 | geometry_msgs/msg/PoseArray |
| ROS2 | geometry_msgs/msg/PoseStamped |
| Custom | foxglove.PosesInFrame |
10.场景实体
| 框架 | 样式 |
|---|---|
| Custom | foxglove.SceneEntity |
| Custom | foxglove.SceneUpdate |
11.转换
| 框架 | 样式 |
|---|---|
| ROS1 | tf/tfMessage |
| ROS1 | tf2_msgs/TFMessage |
| ROS2 | tf2_msgs/msg/TFMessage |
| Custom | foxglove.FrameTransform |
12.雷达
| 框架 | 样式 |
|---|---|
| ROS1 | velodyne_msgs/VelodyneScan |
| ROS2 | velodyne_msgs/msg/VelodyneScan |
13.视频
| 框架 | 样式 |
|---|---|
| ROS1 | foxglove.CompressedVideo |
6.1.3.2.1.2. 设置项
3D面板的设置选项比较多,如下图:
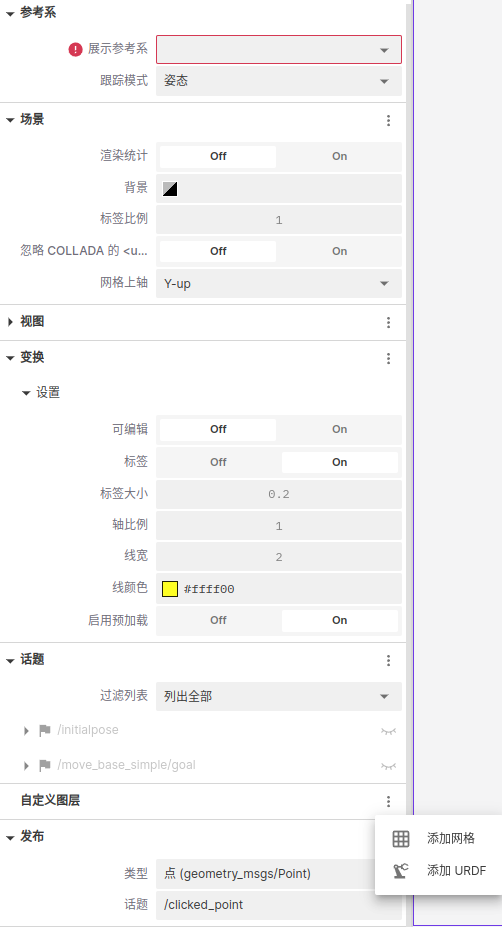
1.参考系:
选择3D场景的显示参考系和追随模式
| 属性 | 描述 |
|---|---|
| 展示参考系 | 配置渲染场景的参考系为了渲染一个场景元素,需要把场景帧到显示帧做一个转换,如果显示帧场景帧就是显示帧,不需要做额外的变换。 |
| 追随模式 | 配置视口的跟随行为姿态--跟随显示帧的位置和方向位置--仅跟随显示帧的位置固定--不更新视口 |
2.场景:
配置一般的渲染属性和视口属性
| 属性 | 描述 |
|---|---|
| 场景统计 | 在面板角落显示渲染性能统计数据 |
| 背景 | 场景背景颜色 |
| 标签缩放 | 渲染标签的比例 |
| 忽略 COLLADA |
忽略COLLADA文件中的 |
| 网格上轴 | 加载没有方向信息的网格(STL、OBJ)时的“向上”方向(“Y-向上”、“Z-向上”) |
3.视图:
配置相机设置
| 属性 | 描述 |
|---|---|
| 同步相机 | 是否同步多个3D面板的相机状态 |
| 距离 | 相机距视口中心的距离 |
| 透视 | 2D(关)和3D(开)视图之间进行切换,2D视图将相机定位为Z轴朝下 |
| 目标X | 视口中心的X坐标 |
| Y | 视口中心的Y坐标 |
| Z | 视口中心的Z坐标 |
| 极角 | 相机的极角 |
| 方向角 | 相机的方向角 |
| Y轴视野 | 相机在Y轴上的视角 |
| 近面 | 相机近平面的距离 |
| 远面 | 相机远平面的距离 |
4.变换:
机器人系统会产生许多描述其对周围世界的观察的消息。这些消息可能存在于一个或多个坐标系中,或者存在于机器人的不同部分上。
变换定义给定时间两个坐标系之间的空间关系。要将对象渲染到场景中,必须存在从对象的坐标系到显示帧的变换路径。
5.话题:
列出包含在场景中显示的受支持消息类型的主题。
每个主题都有单独的设置来配置可视化在场景中的显示方式。
6.自定义图层:
自定义图层允许添加不来自数据源的视图元素。
添加网格
添加URDF
如果数据源支持参数(本机ROS1或者ROS2连接),且/robot_description设置为有效的URDF XML。
添加自定义图层的URDF模型设置如下:
| 属性 | 描述 |
|---|---|
| 源 | URDF文件的来源 |
| URL | 以下方案之一中的URDF源文件:http(s):// --通过HTTP(S)连接package:// --加载包路径(仅桌面版支持)file:// --加载文件路径(仅桌面版支持) |
| 文件路径 | URDF文件路径 |
| 参数 | URDF文件中包含的参数 |
| 话题 | URDF文件包含的话题 |
| 标签 | (可选)自定义图层将在侧边栏中显示的标签 |
| 帧前缀 | (可选)TF前缀 |
| 显示模式 | 要显示的机器人链接几何形状Auto --默认为视觉几何图形,如果没有效果,切换到碰撞几何图形Visual -- 视觉几何图形Collision -- 碰撞几何图形 |
| 颜色 | 如果数据源没有颜色,则可以为URDF模型选择颜色 |
7.发布:
配置3D面板的点击发布行为
| 属性 | 描述 |
|---|---|
| 类型 | 发布的消息类型:点姿态姿态估计 |
| 话题 | 发布消息的话题 |
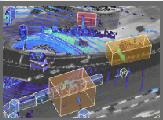
6.1.3.2.2. 主题图
展示当前节点和主题拓扑图形的可视化效果
要使用这个面板,必须通过本机或者Rosbridge连接到实时的ROS系统,使用本机连接效果最好。它可以显示节点、主题和服务。
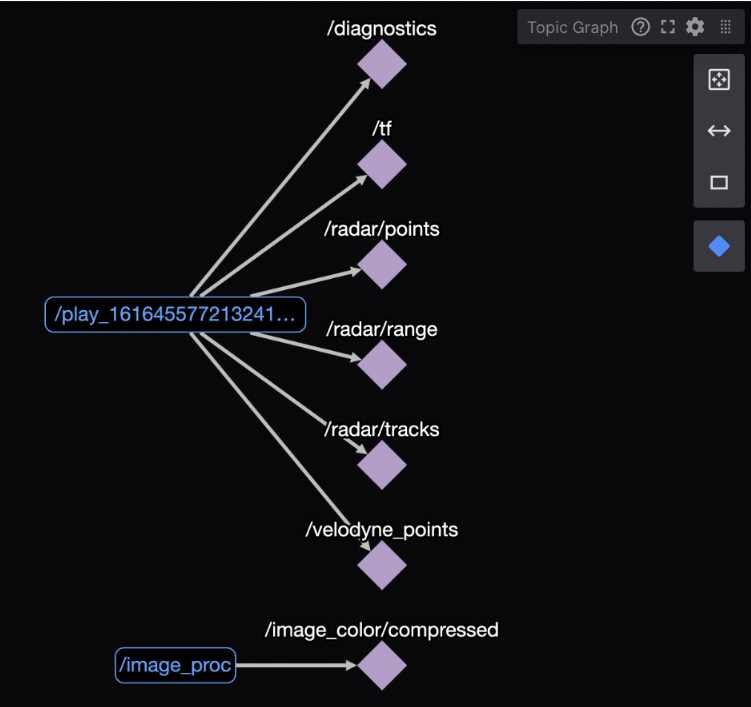
蓝框里是节点
紫色是话题
红框里是服务
6.1.3.2.3. 仪表
基于连续值显示彩色仪表

6.1.3.2.4. 原始消息
检查数据源中的特定路径的消息
6.1.3.2.5. 参数
读取和设置连接的数据源的参数
支持的数据源连接如下:
| Foxglove Websocket | 推荐ROS1、ROS2(用foxglove_bridge)和自定义数据源 |
| ROS1 | 本地连接 |
| Rosbridge | 查看ROS1和ROS2的ROS参数 |
6.1.3.2.6. 发布
将某个话题的消息发布回机器人栈
6.1.3.2.7. 变量滑块
用于快速更新数值变量值
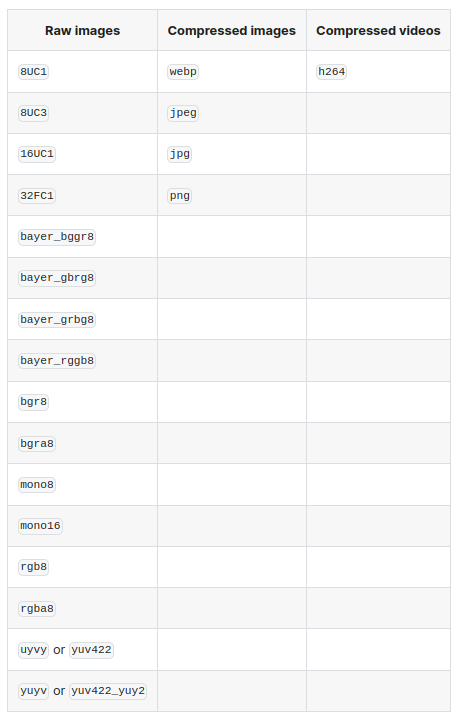
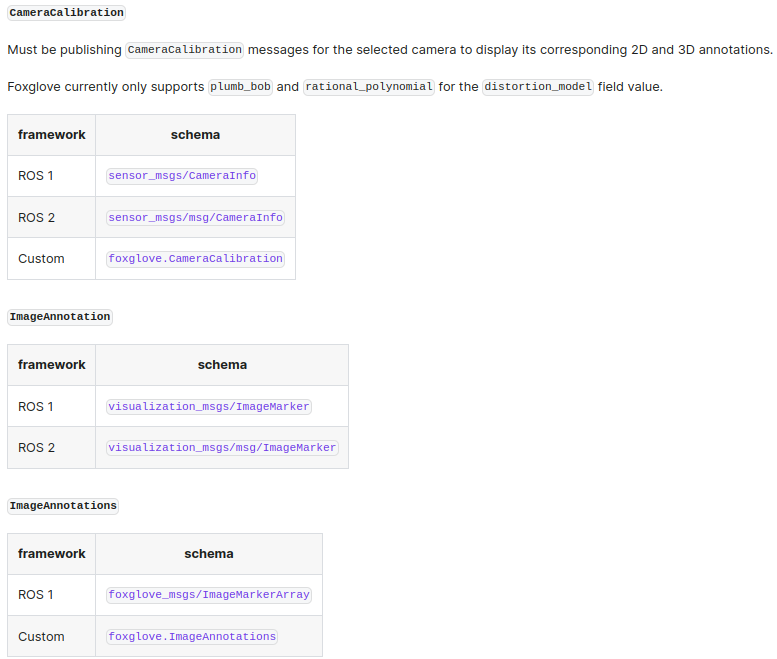
6.1.3.2.8. 图像
显示带有文本标签、圆圈和点等2D注释的原始图像、压缩图像以及压缩视频。
支持的数据源的编码格式:
支持的消息:
必须使用3D标记消息或者以下样式类型之一
原始图像
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/Image |
| ROS2 | sensor_msgs/msg/Image |
| Custom | foxglove.RawImage |
压缩图像
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/CompressedImage |
| ROS2 | sensor_msgs/msg/CompressedImage |
| Custom | foxglove.CompressedImage |
压缩视频
| 框架 | 样式 |
|---|---|
| Custom | foxglove.CompressedVideo |
标定参数
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/CameraInfo |
| ROS2 | sensor_msgs/msg/CameraInfo |
| Custom | foxglove.CameraCalibration |
单个图像标注
| 框架 | 样式 |
|---|---|
| ROS1 | visualization_msgs/ImageMarker |
| ROS2 | visualization_msgs/msg/ImageMarker |
多个图像标注
| 框架 | 样式 |
|---|---|
| ROS1 | foxglove_msgs/ImageMarkerArray |
| Custom | foxglove.ImageAnnotations |
6.1.3.2.9. 图表
绘制主题消息路径中的任意数值。
当播放本地或者远程数据文件时,该面板会在整个播放时间轴上预加载属于指定主题消息路径的数据。
6.1.3.2.10. 地图
把LocationFix 主题消息展示为世界地图上的点。
支持的消息类型
LocationFix
| 框架 | 样式 |
|---|---|
| ROS1 | sensor_msgs/NavSatFix |
| ROS2 | sensor_msgs/msg/NavSatFix |
| Custom | foxglove.LocationFix |
GeoJSON
| 框架 | 样式 |
|---|---|
| Custom | foxglove.Log |
6.1.3.2.11. 指示器
基于阈值值显示彩色或者文本指示器
6.1.3.2.12. 数据源信息
查看已连接数据源的时间和主题信息
6.1.3.2.13. 日志
显示和过滤主题中的日志消息
支持的消息类型:
| 框架 | 样式 |
|---|---|
| ROS1 | rosgraph_msgs/Log |
| ROS2 | rcl_interfaces/msg/Log |
| Custom | foxglove.Log |
6.1.3.2.14. 状态转换
跟踪值随时间变化的情况
当播放预先录制的数据源时,将会为整个播放时间线预加载属于指定主题消息路径的数据。
6.1.3.2.15. 用户脚本
使用自定义脚本在Foxglove内部发布伪主题。操作、减少和过滤现有消息并将其输出以进行有用的可视化。
用户脚本可以转换播放数据和预加载数据。
播放数据—消息逐帧流式传输到Foxglove中,如:原始消息或3D面板数据
预加载数据—正在播放的整个数据范围的消息,如绘制或者状态转换面板的数据 在抓换预加载数据时,Foxglove创建两个正在运行的用户脚本示例,一个处理完整的数据范围,另一个仅处理当前播放的消息帧,用户脚本的每个实例都按照接收时间顺序接收消息。
6.1.3.2.16. 表格
以表格格式展示主题数据
6.1.3.2.17. 诊断-概要
显示所有ROS DiagnosticArray主题消息的摘要
6.1.3.2.18. 诊断-详细信息
显示特定硬件ID的 ROS DiagnosticArray消息
6.1.3.2.19. 调用服务
调用服务并查看其响应,支持实时ROS1和ROS2连接,以及提供服务的自定义Foxglove Websocket连接。
6.1.3.2.20. 远程操纵
通过实时连接远程操控机器人。将给定主题上的geometry_msgs/Twist或geometry_msgs/msg/Twist消息发布回实时ROS堆栈来远程操作机器人。 必须通过本机或者Rosbridge来连接到机器人。 支持的消息: | 框架 | 样式 | | —— | ————————————————————————————————————– | | ROS1 | geometry_msgs/Twist | | ROS2 | geometry_msgs/msg/Twist |
6.1.3.2.21. 选项卡
将面板分组在选项卡界面中
6.1.3.3. 效果展示
6.1.3.3.1. 通过Foxglove WebSocket连接
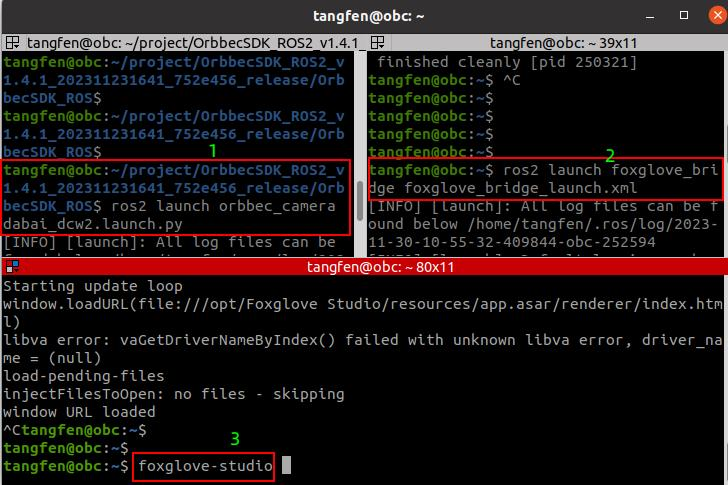
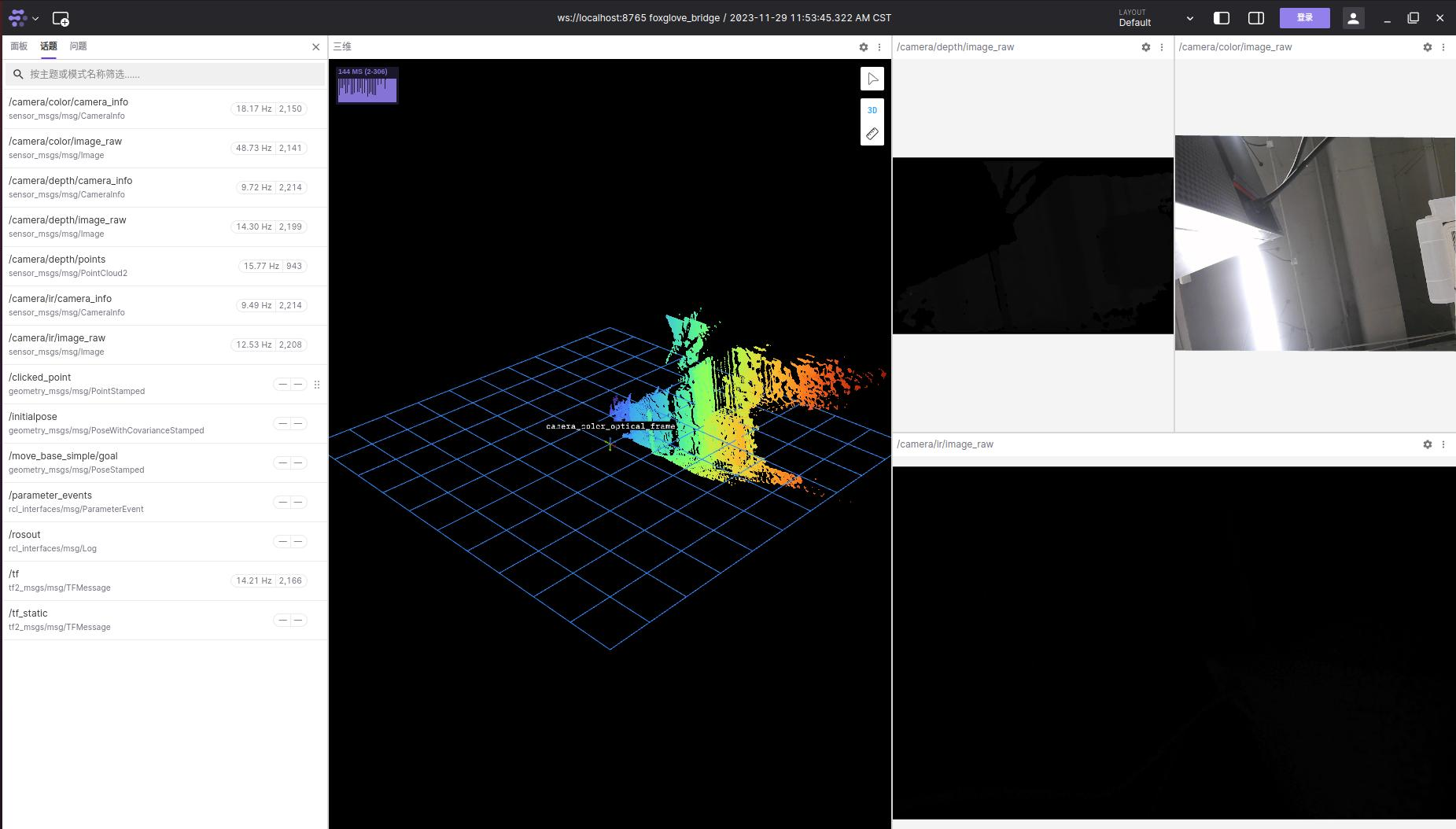
通过Orbbec SDK打开DCW2,通过Foxglove Websocket连接,能显示RGB、深度、IR和点云。
1.通过Orbbec SDK打开DCW2
2.打开foxglove_bridge
3.打开foxglove-studio,打开连接时选择Foxglove websocket 打开三个终端,按照上述3步运行如下:
最终显示的点云、RGB、深度和IR效果如下图:
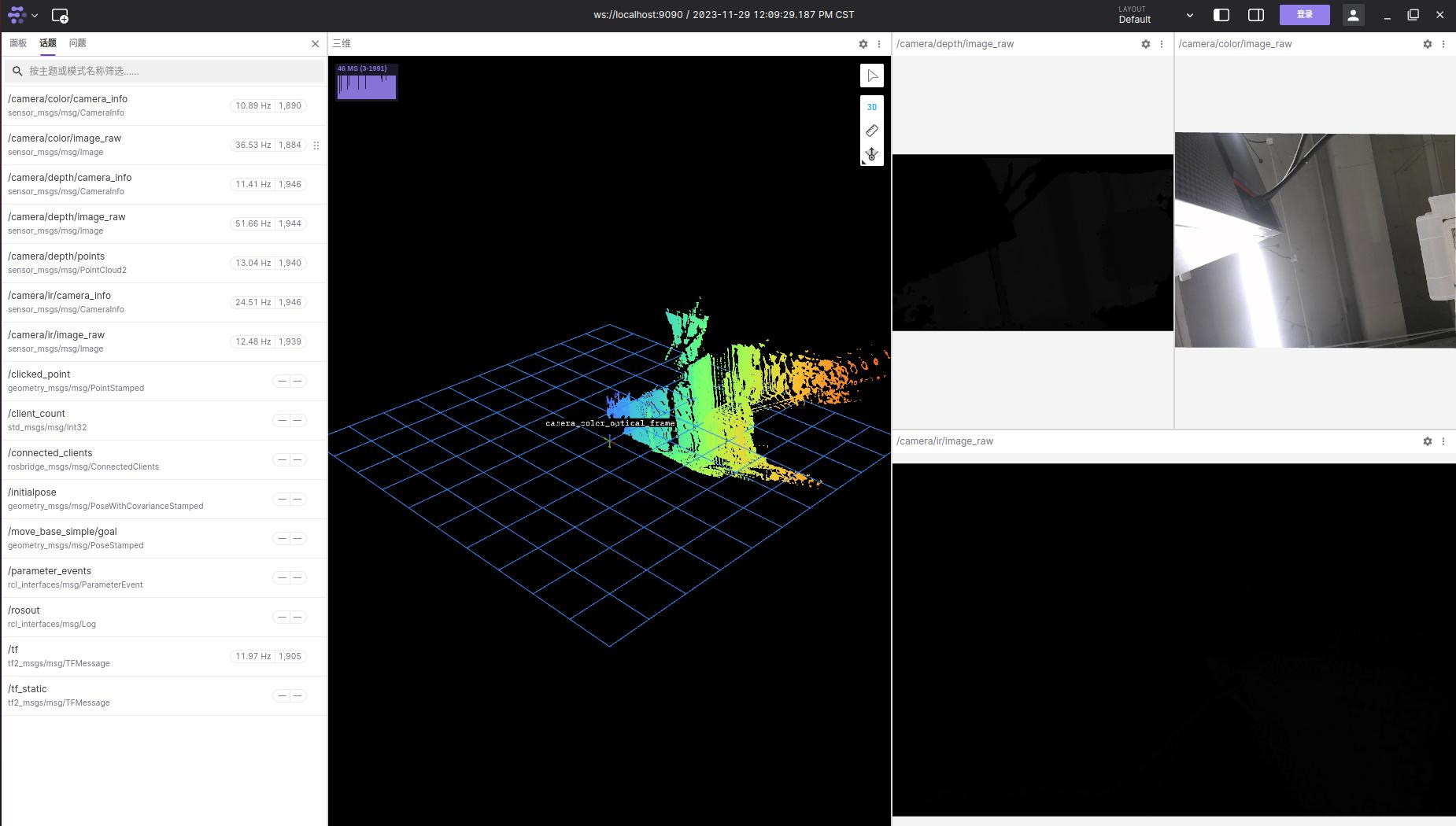
6.1.3.3.2. 通过Rosbridge连接
同样接DCW2,不同点是:打开的rosbridge_server,且foxgolve连接的时选择Rosbridge,也能看到效果图。
6.1.3.4. 自定义扩展开发
当foxglove提供的功能不完全满足我们的需求时,我们可以自定义扩展开发来满足我们的需求。
用JavaScript或者TypeScript写扩展,然后打包成.foxe文件,就可以把这些文件分发到Foxglove组织或者通过marketplace公开(仅桌面app支持通过marketplace安装扩展),一个单一的扩展可以包括多个面板和转换器。
foxgolve提供一系列模板和命令在create-foxglove-extension包内来简化扩展开发。
6.1.3.5. 更新Nodejs版本,搭建开发环境
扩展开发需要:Node.js 14+
ubuntu20.04默认安装nodejs的版本是V10.19.0,该版本太低,无法正常创建一个扩展
通过node -v查看nodejs的版本,如果不满足需求,需更新到V14以上。
通过NPM(节点包管理器)来更新Node.js比较方便,步骤:
1.清除npm缓存
npm cache clean -f
2.安装n,Node的版本管理器
sudo npm install -g n

3.安装n模块后,可以用它来安装最新的稳定版本
sudo n stable
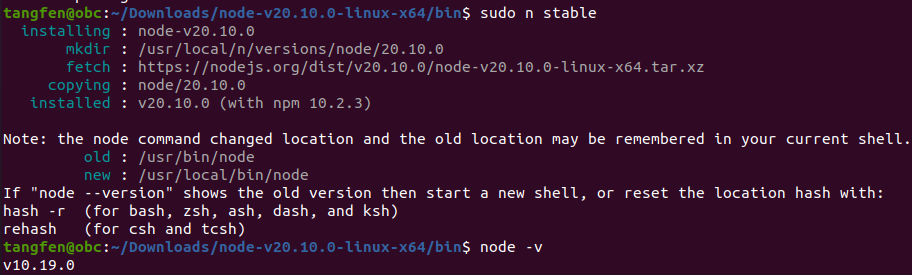
4.此时虽然安装完,但是node -v查看版本时,版本还没变,需重新打开一个终端,然后输入node -v查询,会发现已经成功更新了Nodejs的版本。

6.1.3.6. 自定义扩展的创建
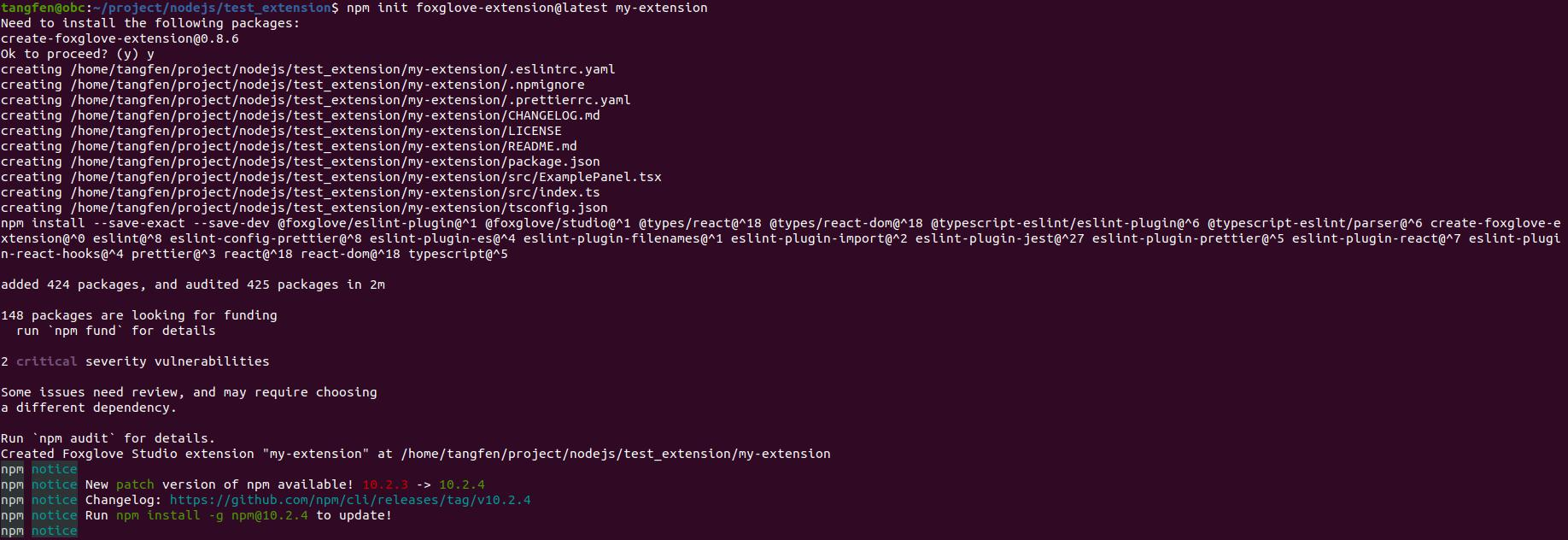
结束后,进入到my-extension目录下,结构如图,进入到src目录下,里边的index.ts文件是扩展的入口点

入口点脚本必须导入一个接收单一参数ExtensionContext的activate函数
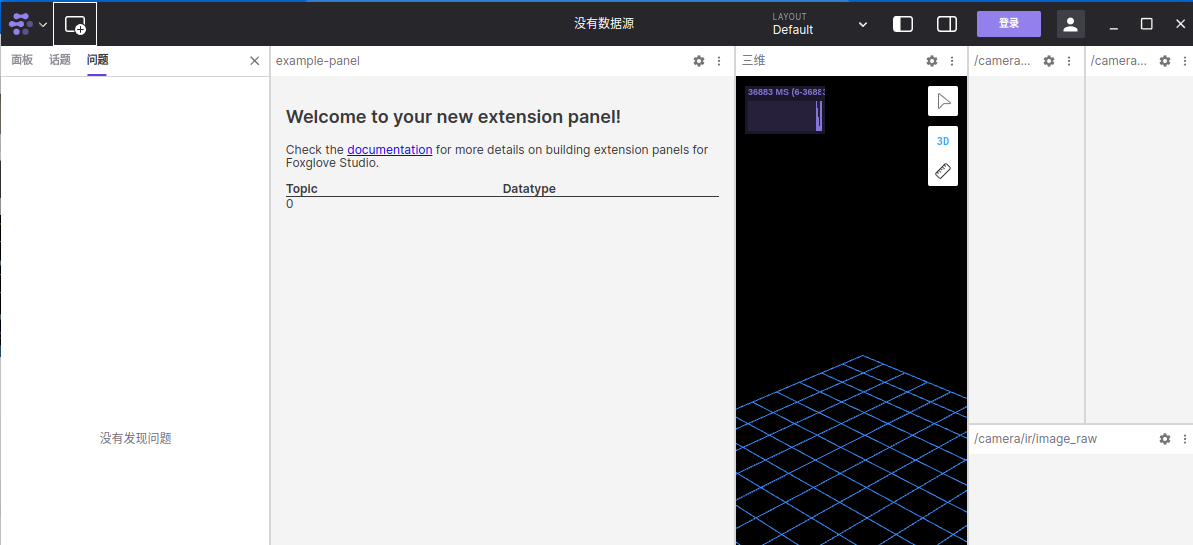
index.ts自动帮我填充了一个名为”example-panel”的面板。
import { ExtensionContext } from "@foxglove/studio";
import { initExamplePanel } from "./ExamplePanel";
export function activate(extensionContext: ExtensionContext): void {
extensionContext.registerPanel({ name: "example-panel", initPanel: initExamplePanel });
}
我们不做任何修改,其实已经创建了一个简单的插件了。
6.1.3.7. 自定义扩展的发布和使用
在扩展目录下,运行如下命令:
npm run local-install
结果如图:
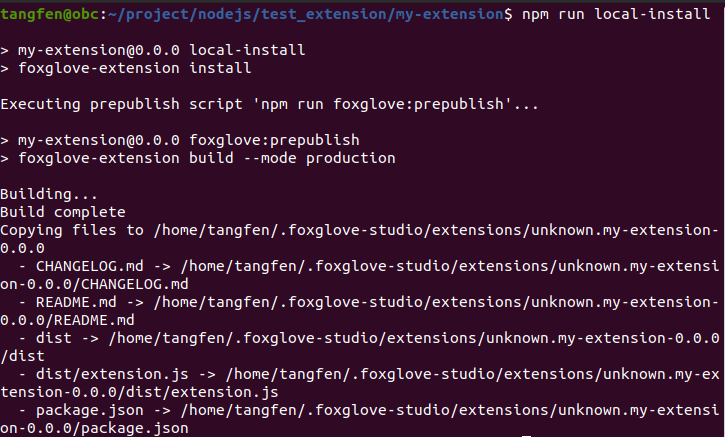
此时将会在foxglove-studio的扩展目录下会生成我们编译好扩展

打开终端运行foxglove-studio
点击添加面板,此时就可以看到我们刚刚创建的面板已经出现了。

选择它,界面如下图: